The MTC has developed a demonstrator that marries machine learning to create a low cost and flexible assembly system which removes the need for expensive fixed tooling.
Most automation technology in industry is specifically programmed for a given task and cannot accept any input variation. Changing the process even slightly can require major investment and this limits manufacturers ability to be flexible and agile.
The challenge of this project was to show that through effective deployment of machine learning technology a low cost assembly system can be created to adapt reactively to the locations of input parts thus eliminating costly fixturing and potentially enabling future human-robot collaboration.
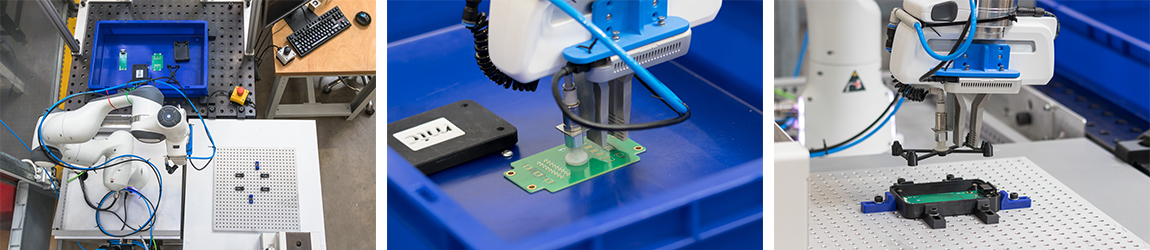
An example product was created to mimic a typical electronic assembly comprising 5 unique components. MTC’s Digital Engineering team developed and trained a neural network model for object pose detection with all results and detection information stored in a database for retrieval and data analysis.
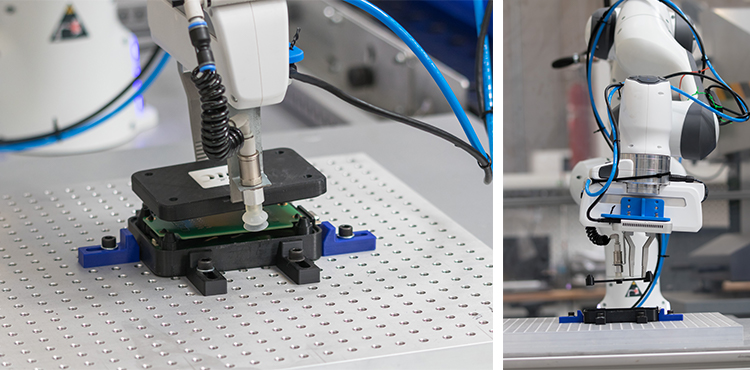
MTC’s Automation and Robotics engineers integrated the detection system into a physical demonstrator using the Robot Operating System (ROS) comprising a Franka Emika collaborative robot and low cost vision sensors.
An object pose detection system returned 98.8% successful detections, with 96.8% of detected object poses estimated within target tolerance.
The system demonstrated a general approach to the application of machine learning. It was possible to swap the input tray with little affect on performance.
A robot system was developed able to successfully grasp parts and assemble the example product.
The current demonstrator meets TRL 6 - Technology model or prototype demonstration in a relevant environment.
A blueprint for developing and implementing intelligent vision systems to industrial problems in an effective manner; opening up potential applications in human-robot collaboration.
Eliminated the need for part fixtures. Robot system adapts to new layouts without re-programming.
Traceable decision making allows any errors to be addressed effectively.
As the system is “trained” for each set of parts, the demonstrated framework is applicable to any new assembly.