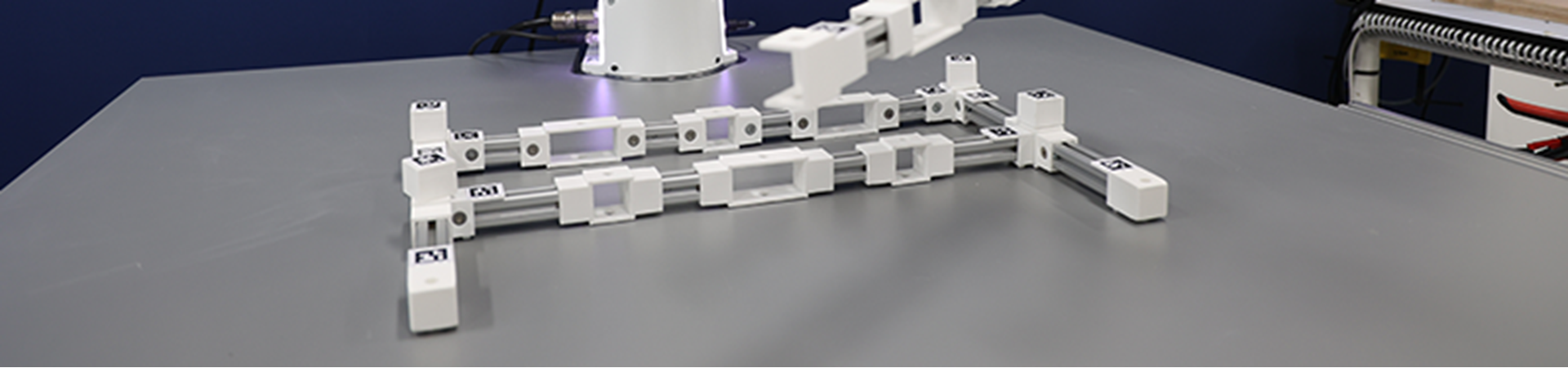
Introducing RAMP, the Robotic Assembly Manipulation and Planning benchmark designed to stimulate research and solve challenging problems in autonomous robotic assembly. With a low barrier to entry and materials that are easy to obtain, RAMP covers a range of open problems that can be dealt with independently or simultaneously. The benchmark is informed by the needs of industry, with offsite construction as the basis for the benchmark.
The 3D printed and extruded aluminium parts are cheap and accessible worldwide, with an accurate simulation environment provided in Nvidia Isaac to further lower the barrier to entry. The benchmark includes easy, medium, and hard categories of pre-specified assemblies, and a baseline method is provided to allow adopters to focus on select open problems.


The industry inspired problem of offsite construction, where parts are pre-assembled offsite and installed in-situ is the problem domain for the RAMP benchmark. Offsite construction is attractive because it supports a substantial reduction in total build time through parallel production of modular assemblies alongside site works. However, while beams for the internal structure of a building constructed offsite are often produced through light-steel-roll-forming before they are cut and punched to size - a process that is readily automated - the assembly of beams into frames remains a manual process.
What complicates matters is that there is a high likelihood of every assembly being different. Automating the assembly process itself requires robust perception, versatile skill primitives, long-horizon task and motion planning, robust action execution and fault recovery. It touches on the full gamut of robotics research. Delivering this capability requires a focused and concerted effort.

To read a full overview of RAMP and keep up to date with project developments, visit: RAMP Benchmark (google.com)
To access the code for RAMP, please visit: GitHub - applied-ai-lab/ramp: A codebase for RAMP: A Benchmark for Evaluating Robotic Assembly Manipulation and Planning
To read the RAMP paper, please visit: [2305.09644] RAMP: A Benchmark for Evaluating Robotic Assembly Manipulation and Planning (arxiv.org)
For further information on the work completed in RAMP, please fill out the form below and a member of the MTC team will be in touch: